Slide
Show JP
☰
探索
サインイン
サインアップ
アップロード
×
ダウンロード
カテゴリーなし
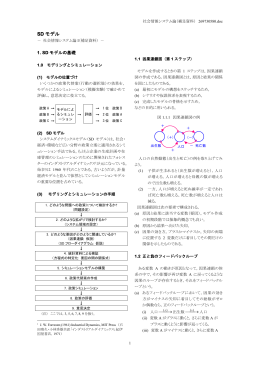
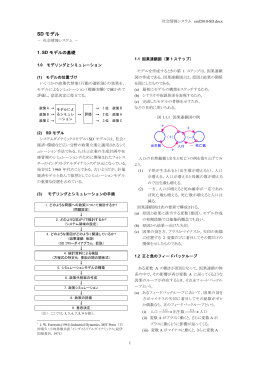
都市システム演習 (専門演習I)
sinfI2005_SD
SDモデルについて