Slide
Show JP
☰
探索
サインイン
サインアップ
アップロード
×
ダウンロード
カテゴリーなし
衛星航法システムGPS/WAASの現状
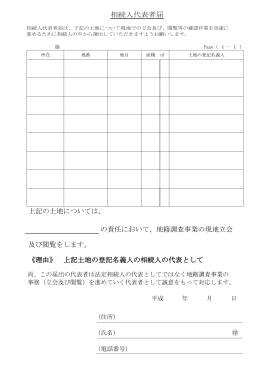
03地籍 相続人代表者届
目 次
立方クラゲ類のタンパク質毒素の化学的性状 永井宏史 、宅和京子