Slide
Show JP
☰
探索
サインイン
サインアップ
アップロード
×
ダウンロード
カテゴリーなし
H18講義スライド(MS-PowerPoint)
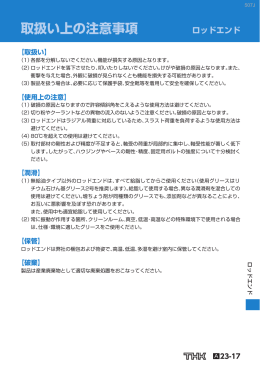
取扱い上の注意事項
H18講義用スライド(MS-PowerPoint,1.3MB)
H14講義用スライド(MS-PowerPoint簡易版,1311kB)
回転運動伝達部品
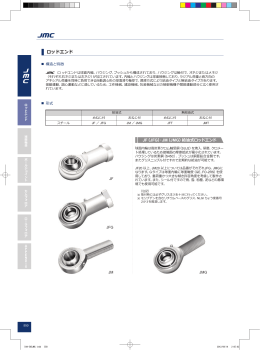
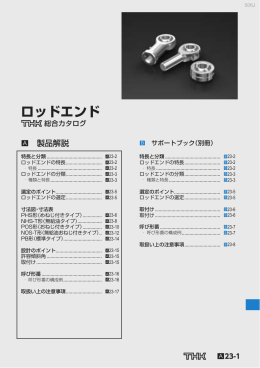
ロッドエンド
ロッドエンドの分類