Slide
Show JP
☰
探索
サインイン
サインアップ
アップロード
×
ダウンロード
カテゴリーなし
光波距離センサを用いた非定常海洋波の波速,方位および変位計測
6. 5 観光客用マップ (551KB / PDF)
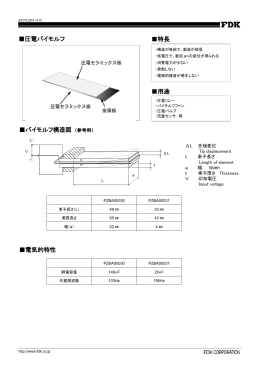
Choke coil selection guide