Slide
Show JP
☰
探り
ログイン
ユーザーアカウントの作成
Upload
×
ダウンロード
No category
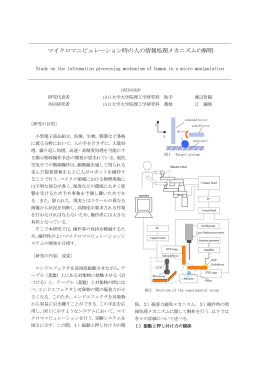
3.ロボットと物体との相互作用に基づく物体整形のための動作生成
3.クリッカーの教育利用
科目の関係性に基づくシラバス分析手法に関する研究 A Study on
強化学習 - 日本大学生産工学部
白神 道空
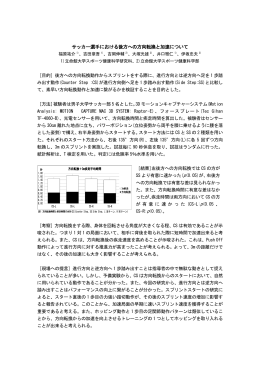
サッカー選手における後方への方向転換と加速について
Document
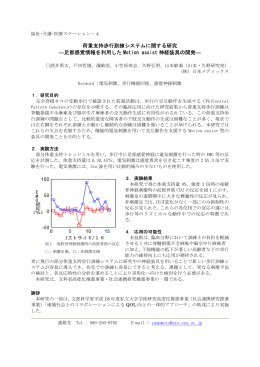
荷重支持歩行訓練システムに関する研究 ―足部感覚情報を利用した