Slide
Show JP
☰
探り
ログイン
ユーザーアカウントの作成
Upload
×
ダウンロード
No category
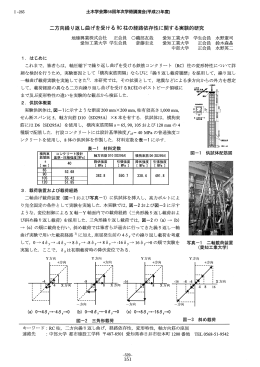
2方向オンライ ン応答実験システムの開発
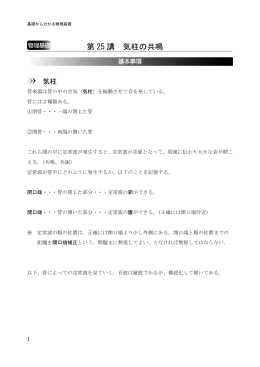
物理基礎第25講
Slide 1
Document
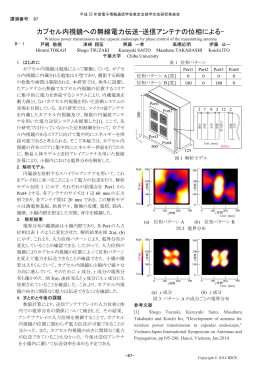
カプセル内視鏡への無線電力伝送-送信アンテナの
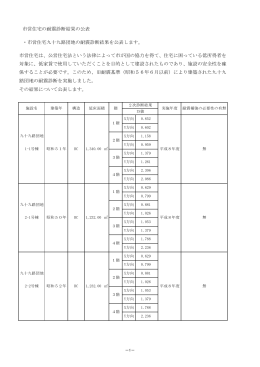
市営住宅九十九地団地の耐震診断結果
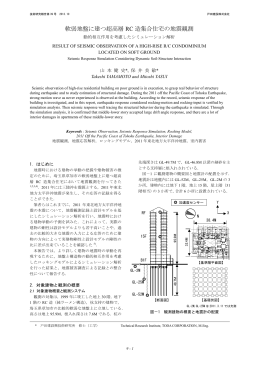
軟弱地盤に建つ超高層RC造集合住宅の地震観測 動的相互