Slide
Show JP
☰
探り
ログイン
ユーザーアカウントの作成
Upload
×
ダウンロード
No category
第9回
ÿþ \PQÑy:−Bv UP - to - DATE
審査の結果の要旨 氏名 赤松 智久 本研究は、ラットの新生仔 HIE モデル
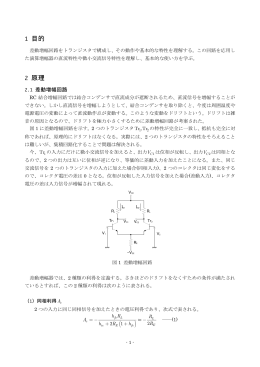
10.差動増幅器