Slide
Show JP
☰
探り
ログイン
ユーザーアカウントの作成
Upload
×
ダウンロード
No category
LEGO車両
〈F〉 3月 14日・15日(土・日) 大阪府立大学
ロボット制御プログラミングによる情報処理教育の試み
勇気なき賢者より勇気あるバカを
倒立振子の制御
真珠とり (PDF/550KB)
レゴ・グループ、アジア地域での成長に対応するため
ニーズに裏付けされたアイデアは「価値ある知財」 「欲しい」を売れる商品
レゴ®ブロックを使って、 「ものづくり」と「動くしくみ」を
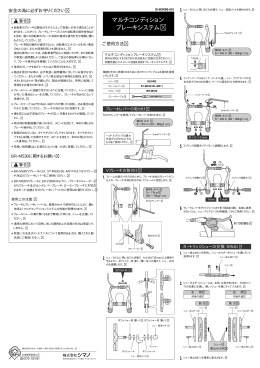
マルチコンディション ブレーキシステム
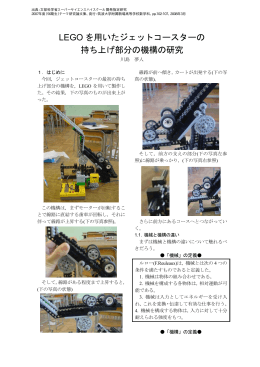
LEGO を用いたジェットコースターの 持ち上げ部分の機構の
「真夏の夜の星空上映会」
ネクソングループ、「レゴ®」を題材とした スマートフォン向けゲームの開発
湘南C-Xスクールで春の体験レッスン申し込み受付開始!
会社案内PDF(11ページ 5.2MB)
ストップモーションアニメ
遺伝的アルゴリズムを用いた パーツ組合せ型ロボットの機体設計支援
女性リーダーのためのチームワーク研修
リンク機構と作図ツールによる合同変換の指導に関する研究
しんかい - LEGO.com
LEGOrics: 外観を保ちつつ電気的に拡張した LEGO
見る/開く - JAIST学術研究成果リポジトリ
StudI/O:立体への投影を利用したトイブロック組み立て支援