Slide
Show JP
☰
探り
ログイン
ユーザーアカウントの作成
Upload
×
ダウンロード
No category
2軸駆動電動車両の製作実習装置 電動3輪車製作実習装置
ソフトウェア - Nichibun.net
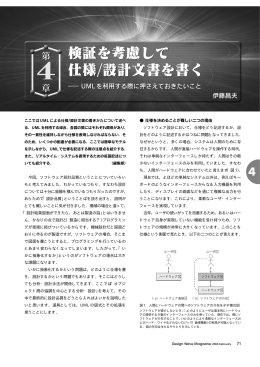
山田 正樹
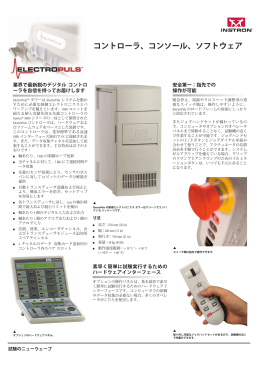
ElectroPuls コントローラ、コンソール、ソフトウェア
「ソフトウェアに関する会計処理について(通知
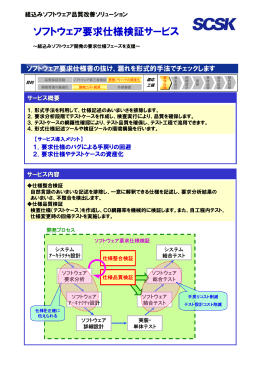
ソフトウェア要求仕様検証サービス(250KB)
意匠法による画像デザインの保護について - D
広告表示プリンタシステム (アドプリ)による商店街活性化事業
4 4
NutanixのVMセントリックなバックアップと ディザスタリカバリ
PDF文書/128KB
マウス・クリックで即高速化! Xilinx社最新開発環境SDSoC
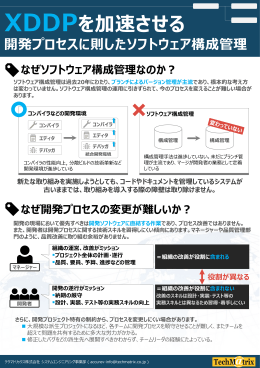
役割が異なる
ノーベルクリニシャン・ソフトウェア Ver.2.0 発売のお知らせ
法律/コンプライアンス面から見た ライセンス管理の必要性
2016年2月1日現在 - PartXplore
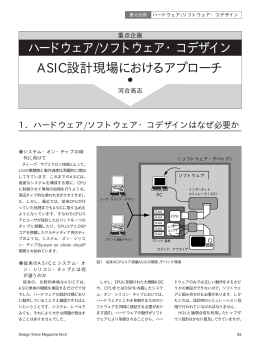
ハードウェア/ソフトウェア・コデザイン
InstaSPINTM-FOC - 日本テキサス・インスツルメンツ
ハードウェア・ソフトウェア協調設計技術
ソフトウェア・テストの30年前と30年後
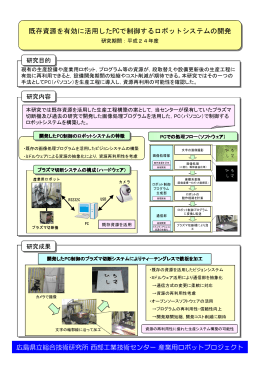
既存資源を有効に活用した PCで制御するロボットシステムの開発
ストレージ・ソフトウェア・メンテナンスについての重要なお知らせ
【お知らせ】 2013年文書情報マネジメントの市場動向調査