Slide
Show JP
☰
探索
サインイン
サインアップ
アップロード
×
ダウンロード
カテゴリーなし
1P1-52-077
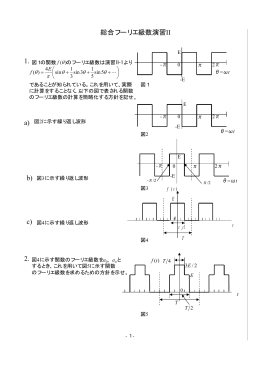
総合演習 フーリエ級数の計算II
課題4
sin 2 +
ケプラー方程式を実装したJAVAによる太陽系シミュレータ
。身ラモ ラれAλ ≦三′マ 「 ιイ¬∴九
小技3