Slide
Show JP
☰
探り
ログイン
ユーザーアカウントの作成
Upload
×
ダウンロード
No category
近似アルゴリズム 第10章 終了時刻最小化スケジューリング
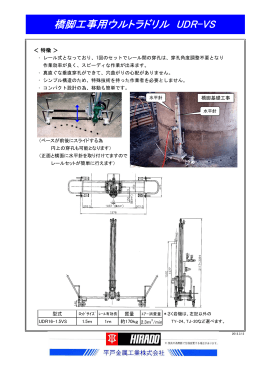
橋脚工事用ウルトラドリル UDR-VS