Slide
Show JP
☰
探索
サインイン
サインアップ
アップロード
×
ダウンロード
カテゴリーなし
実験3:プログラムによる制御
ダウンロード(doc 45KB)
PDF形式 404.1KB
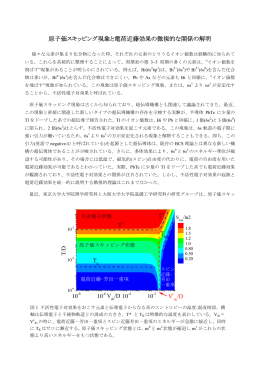
原子価スキッピング現象と電荷近藤効果の微視的な関係
接触場面における会話の調整行動
Title アメリカ危機管理における市民教育 --組織開発的視座よ り-
微分幾何学の新機能
用語解説(297KBytes)
10km対応テレメータカード(形式:D3-LT9) - M
自己記述性に基づく専門用語辞書作成支援手法
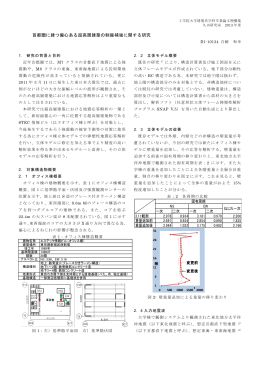
首都圏に建つ偏心ある超高層建築の制振補強に関する研究
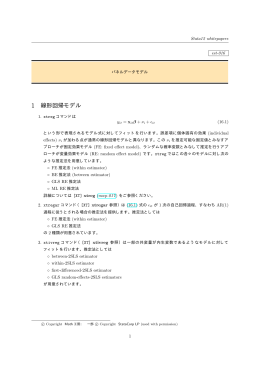
1 線形回帰モデル
論文要旨(PDF/110KB)