Slide
Show JP
☰
探索
サインイン
サインアップ
アップロード
×
ダウンロード
カテゴリーなし
(57)【要約】 【課題】構造物の全体形状と亀裂の両方をリアルタイム に
Document
両豊記による豊前
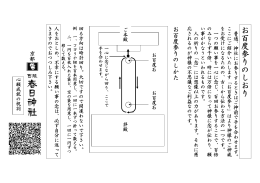
お 百 度 参 り の し お り