Slide
Show JP
☰
探り
ログイン
ユーザーアカウントの作成
Upload
×
ダウンロード
No category
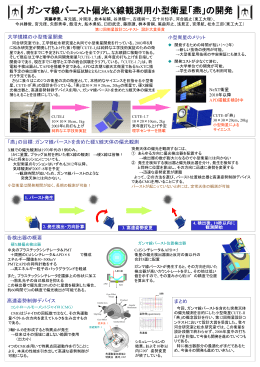
ガンマ線バースト偏光X線観測用小型衛星 - 河合研究室
砂療法をしませんか?
ガンマ線バースト偏光X線観測用小型衛星 - 河合研究室
ガンマ線バースト偏光X線観測用小型衛星「燕」の開発 斉藤孝男
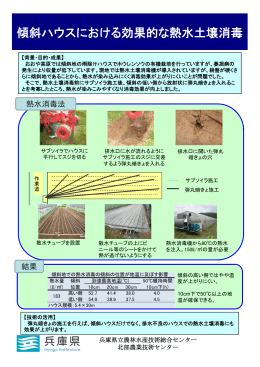
傾斜ハウスにおける効果的な熱水土壌消毒
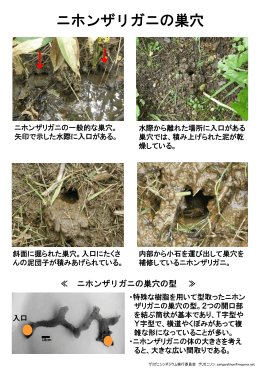
10.ザリガニの不思議①ニホンザリガニの巣穴
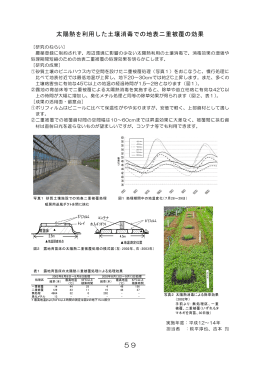
太陽熱を利用した土壌消毒での地表二重被覆の効果 59
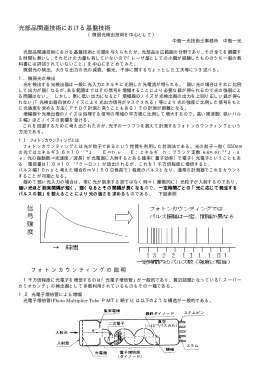
光部品関連技術における基盤技術
【付録1】 Excel 2007でボタンを配置するには