Slide
Show JP
☰
探索
サインイン
サインアップ
アップロード
×
ダウンロード
カテゴリーなし
空間図形の取り扱いについて
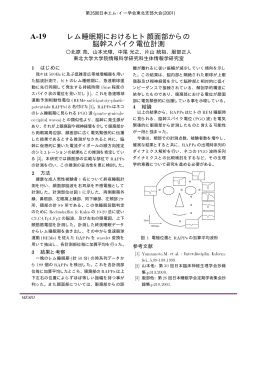
レム睡眠期におけるヒト顔面部からの 脳幹スパイク電位計測
オートファジー膜の脂質分布をナノレベルで解明
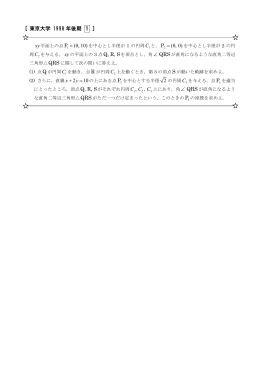
東京大学 1998 年後期 1
個人情報の取り扱い
2_4 自然換気の仕組みと基礎
情報保護と暗号システム
平成15年度研究報告pdf 2004年5月
アキシアル・リッチ糖を用いた β
Pose Guide Ontologyによるアイドル画像のポーズ分類