Slide
Show JP
☰
探索
サインイン
サインアップ
アップロード
×
ダウンロード
カテゴリーなし
カラーラインセンサを用いた高精細 3 次元復元
6. 5 観光客用マップ (551KB / PDF)
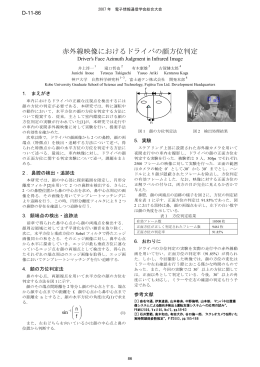
赤外線映像におけるドライバの顔方位判定
3.クリッカーの教育利用
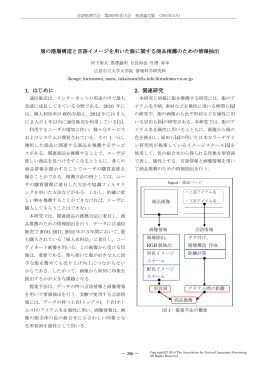
服の階層構造と言語イメージを用いた服に関する商品推薦のための情報
0.3MB
様式 C-19 科学研究費補助金研究成果報告書 - KAKEN
モバイル型 AR ブロックアプリケーションの開発
江戸城外濠周辺地区における景観評価 の定量化に関する研究
大面積の色光が及ぼす不快感 Discomfort of Large area Colored Lights
画像内特徴抽出に基づく非写実的描画方法の検討
平成19年度高質感映像に関する調査研究報告書 社団法人日本機械
可変減衰オイルダンパーを用いたセミアクティブ免震構造の開発