Slide
Show JP
☰
探り
ログイン
ユーザーアカウントの作成
Upload
×
ダウンロード
No category
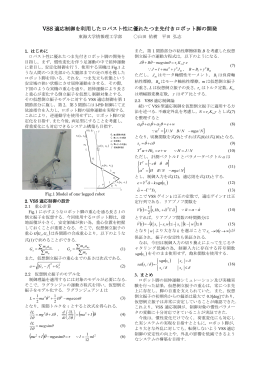
1 脚ロボットの屈伸動作における安定化制御に関する研究 [ ] ( )s
Document
2組の3軸加速度センサを用いたモーションセンサシステムの開発
高エネルギー加速器研究機構 大型シミュレーション研究 07
― VSS によるファイルおよびフォルダの復元方法― 01 版
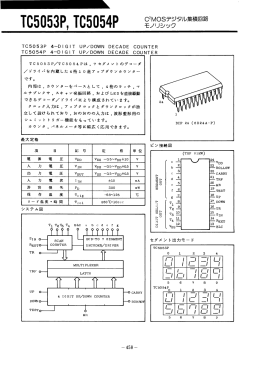
TOSHIBA C2MOS ver6 1984/09
平成 26 年度インフラシステム輸出促進調査等事業
ActiveImage Protector White Paper
VSS から学ぶ バックアップの考え方について