Slide
Show JP
☰
探索
サインイン
サインアップ
アップロード
×
ダウンロード
カテゴリーなし
第9回ゼミ輪講
FX証拠金取引業者がビジネスを運営するために 必要なすべて
Integral – 最もフレキシブルな OTC FX 取引ネット ワークとFX流動性
最先端の三次元映像処理技術で 医療の未来を拓く
GPGPU技術についての調査とCUDAに よるCDBの実装
Fast Approximated SIFT
筑波大学 計算科学研究センターからスーパーコンピュータシステムを
fujii3
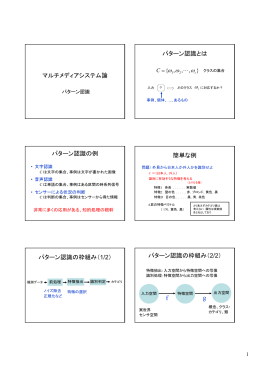
マルチメディアシステム論 パターン認識とは ω ω ω パターン認識の例
ADFによる有機分子結晶の移動度計算:ホッピング伝導とバンド伝導
「統合的な知」による身体体験 ~マインド中心の
PowerPoint
GPGPUによる並列演算処理について