Slide
Show JP
☰
探り
ログイン
ユーザーアカウントの作成
Upload
×
ダウンロード
No category
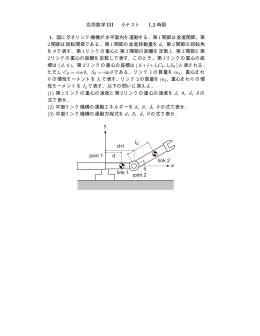
θ d+l link 1 joint 1 joint 2 lc x y d link 2
θ d+l link 1 joint 1 joint 2 lc xyd link 2
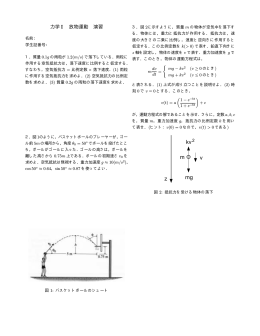
zmv mg kv