Slide
Show JP
☰
探索
サインイン
サインアップ
アップロード
×
ダウンロード
カテゴリーなし
ステッピングモータを用いた移動ロボットの制御
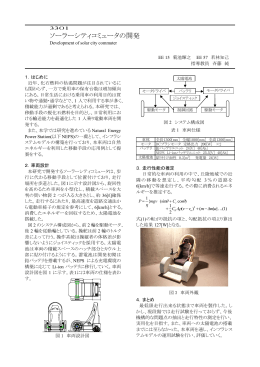
ソーラーシティコミュータの開発 Development of solar city commuter
コントローラ設定キット ソフトウェア(ACT Controller)バージョンアップ手順
シャフトモータ - 日本パルスモーター
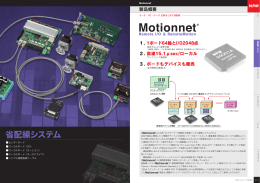
02.省配線システム - 日本パルスモーター