Slide
Show JP
☰
探索
サインイン
サインアップ
アップロード
×
ダウンロード
カテゴリーなし
1 - 熊本大学学術リポジトリ
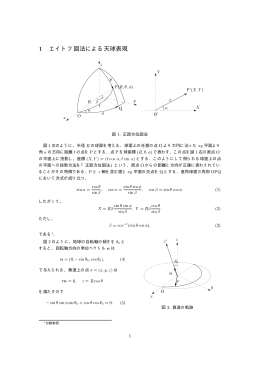
エイトフ図法による天球表現
R = (2)
Taro-1章 正負の数 - Gアップシート・Gベース学習サイト
科目名 教員名 指定クラス 2/9(WED) 構造化学 近藤高志 理一 7