Slide
Show JP
☰
探索
サインイン
サインアップ
アップロード
×
ダウンロード
カテゴリーなし
終端状態制御による 3 リンクロボットアームの制御
数学 II 演習 2008 年 11 月 26 日担当:寺杣友秀 1. R2 から R3 への
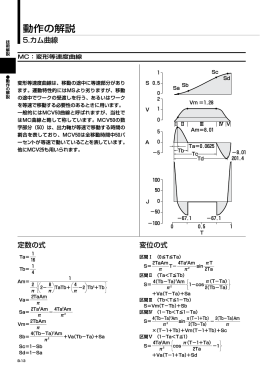
微分の基本公式
Document
6の略解 1) ―――――――( tvdtti C tRi = 1 t tv ω sin = ただし, ≥ t と
Document