Slide
Show JP
☰
探索
サインイン
サインアップ
アップロード
×
ダウンロード
カテゴリーなし
講義概要 - C-faculty
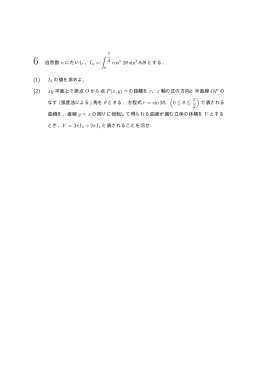
専 門(数 学) - 静岡大学理学部
pdfファイル(右クリックでダウンロード)
微分積分学概論 AI 要約 NO.8 関数の極限値・左極限、右極限。 今回
概要 - C-faculty
概要 - C-faculty