Slide
Show JP
☰
探り
ログイン
ユーザーアカウントの作成
Upload
×
ダウンロード
No category
実世界イベント記述言語 - NTTコミュニケーション科学基礎研究所
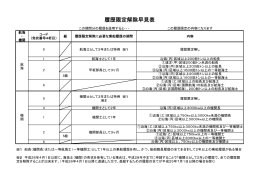
履歴限定解除早見表