Slide
Show JP
☰
探索
サインイン
サインアップ
アップロード
×
ダウンロード
カテゴリーなし
第3章 1次元の運動(2)
PowerPointファイルのダウンロード
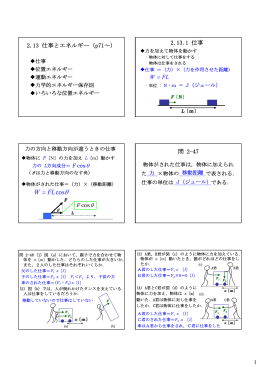
cos FL W
)0,0), sin( ( t kz a A − = о
解析学 B 宿題 No. 4 (2013.10.23)
¡ m dv dt= −mg sin θ v = l dθ dt d2θ dt2 = − g l sin θ よって,sin θ ≈ θ
Document
数理科学II 2007年度夏学期期末試験問題
(1). ( f(x) = x3 + 3x2 + 2x − 1 g(x) = x2 + 1 (2). ( f(x) = x3 + 3x2 + 2x
力学I − αβ 中間試験( 6/15 )解答