Slide
Show JP
☰
探索
サインイン
サインアップ
アップロード
×
ダウンロード
カテゴリーなし
退職記念講演 制御屋のロボット工学
「ドラゴンフルーツ」のダウンロード PDF
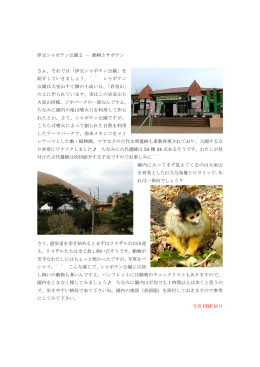
伊豆シャボテン公園 - Shizuoka Guide
チラシ - 広島平和記念資料館
スライド - 計算基盤研究室
CACTUS® PC ドライヤ 空気除湿膜 - Air Products and Chemicals, Inc.
FINE series PURE® 高温バルブ series 極
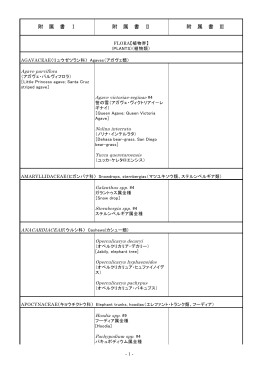
附 属 書 Ⅰ 附 属 書 Ⅱ 附 属 書 Ⅲ
ベローズ・メタルダイヤフラム