Slide
Show JP
☰
探索
サインイン
サインアップ
アップロード
×
ダウンロード
カテゴリーなし
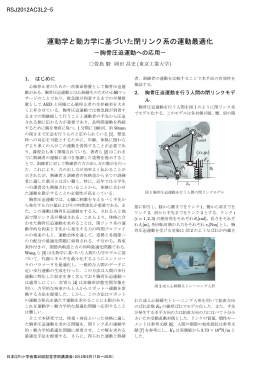
パワーアシスト車椅子における 後方転倒現象の解析とその
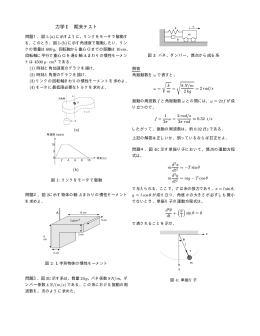
問題 解答例 補足
PDF File
2000期末テスト
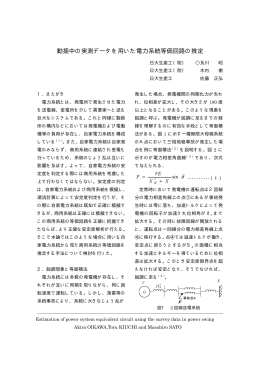
動揺中の実測データを用いた電力系統等価回路の推定
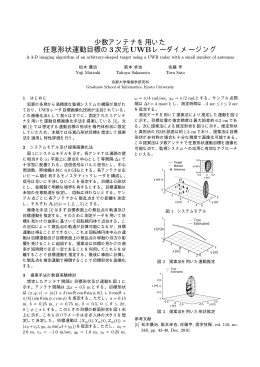
少数アンテナを用いた 任意形状運動目標の3次元UWB
6. 5 観光客用マップ (551KB / PDF)
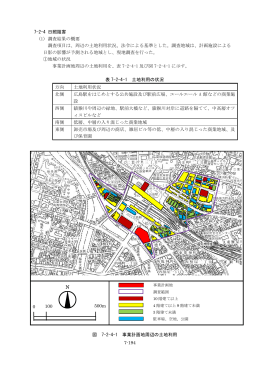
7-2-4 日照阻害(PDF文書)