Slide
Show JP
☰
探り
ログイン
ユーザーアカウントの作成
Upload
×
ダウンロード
No category
2A2-A16
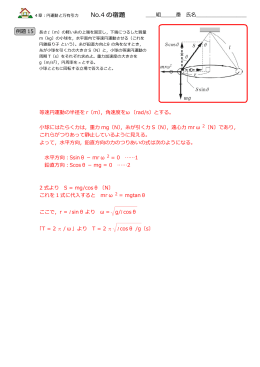
__組___番 氏名______ 例題 15 等速円運動の半径を r〔m
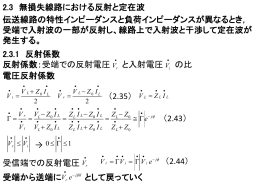
アプリケーションノート 02 –電気インターフェース DS 電気エンコーダ™
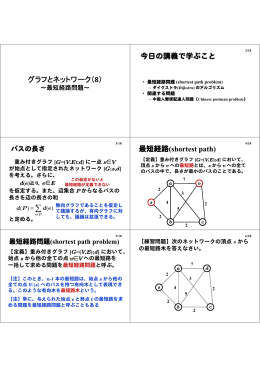
グラフとネットワーク(8) 今日の講義で学ぶこと 最短経路(shortest path)
第三回