Slide
Show JP
☰
探り
ログイン
ユーザーアカウントの作成
Upload
×
ダウンロード
No category
L - 東京大学
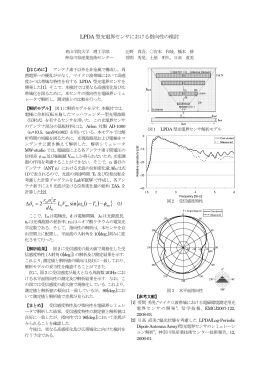
LPDA型光電界センサにおける指向性の検討
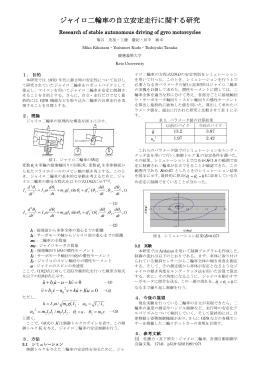
ジャイロ二輪車の自立安定走行に関する研究
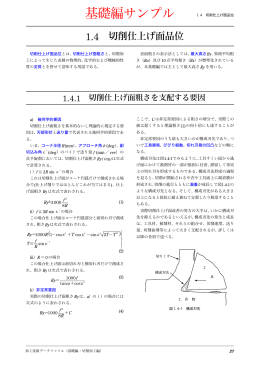
基礎編サンプル
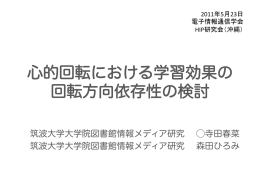
心的回転における学習効果の 回転方向依存性の検討