Slide
Show JP
☰
探索
サインイン
サインアップ
アップロード
×
ダウンロード
カテゴリーなし
2次元球面と3次元球面 - 東京大学大学院数理科学研究科
量子力学の受講者のみなさんへ 担当 榎森啓元 配布資料「粒子性と波動
数学 II 演習 2008 年 11 月 26 日担当:寺杣友秀 1. R2 から R3 への
微分の基本公式
第2回(期限4/23)
Document
第7回 レポート課題
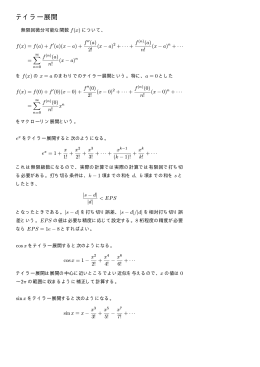
テイラー展開 - mk
Document
配布資料
6の略解 1) ―――――――( tvdtti C tRi = 1 t tv ω sin = ただし, ≥ t と