Slide
Show JP
☰
探索
サインイン
サインアップ
アップロード
×
ダウンロード
カテゴリーなし
松葉杖歩行者の為の経路案内 提示手法の提案
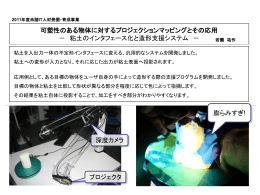
可塑性のある物体に対するプロジェクションマッピングとその応用 - 粘土
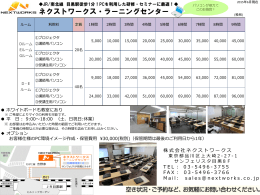
価格表(PDF) - 株式会社ネクストワークス
多指向映像スクリーン技術
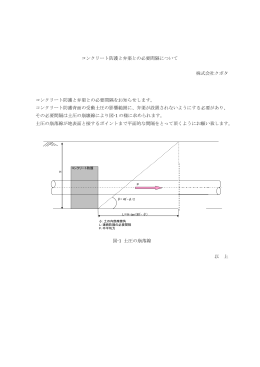
コンクリート防護と弁渠との必要間隔について 株式会社クボタ コンクリート
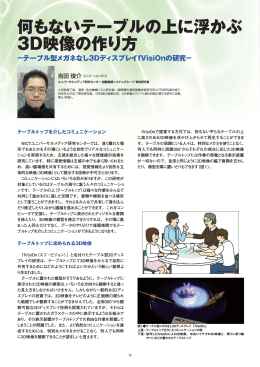
何もないテーブルの上に浮かぶ 3D映像の作り方
周辺視刺激が引き起こす視覚誘導性自己運動感覚の分析
複合鏡を用いた全周囲3次元形状計測のための プロジェクタ
プロジェクタ・カメラシステムのレスポンス関数を用いた位相シフト法