Slide
Show JP
☰
探索
サインイン
サインアップ
アップロード
×
ダウンロード
カテゴリーなし
選炭ジグ装置のモデリング
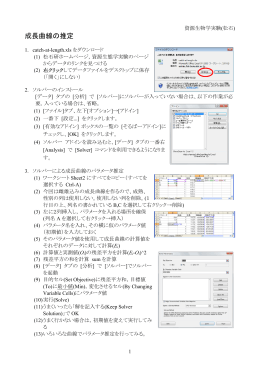
成長曲線の推定
数学は見て理解しましょう 講習2(90 分)
第14回 - 日本原子力学会
システム収穫表「北海道版カラマツ人工林収穫予測ソフト」の開発
09 4.2.9 偏心や梁段差のある柱梁接合部の検討 [PDFファイル/455KB]
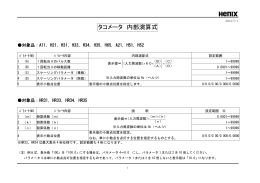
詳細はこちら - ヘニックス
C01-2班 コンピュータグラフィックス による質感表現技術
Multi LABELIST V5
AV-HS6000 Ver3 プラグイン External_Control プロトコル
8.特殊調整機能
IF 仕様書
日本語音声合成エンジン for Android SDK
![09 4.2.9 偏心や梁段差のある柱梁接合部の検討 [PDFファイル/455KB]](http://s1.slideshowjp.com/store/data/000883613_1-be6594535f27046696537735a26ee9cb-260x520.png)