Slide
Show JP
☰
探り
ログイン
ユーザーアカウントの作成
Upload
×
ダウンロード
No category
このパワポ
卒論実験計画
子音カテゴリカル知覚とは
Syllabus Id Subject Id 更新履歴 授業科目名 担当
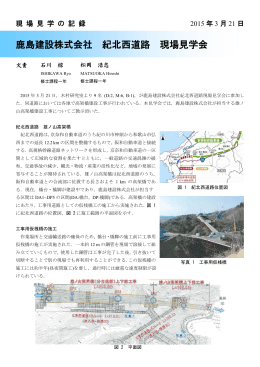
鹿島建設株式会社 紀北西道路 現場見学会
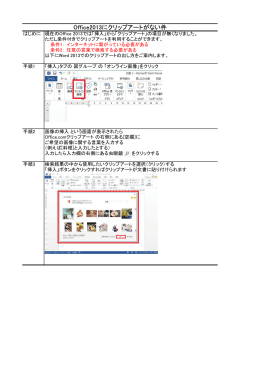
Office2013にクリップアートがない件
卒論実験計画
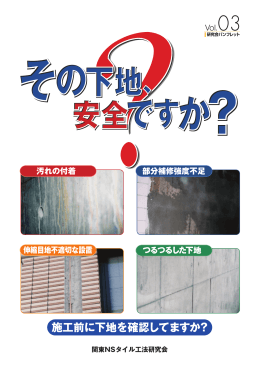
施工前に下地を確認してますか?
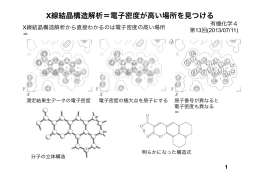
X線結晶構造解析=電子密度が高い場所を見つける
HIKONE RONSO_213_262
一致の非対称の極小理論的分析
とろみ調整食品の溶解方法の違いがとろみの程度に
ヒュッケル分子軌道法
1 証明とコンセプションの関係 ~「二偶数の和の証明」の分析と検証を例
海外年金基金レポート 第5回 = スウェーデン公的年金基金(AP
Prius 製品仕様
弱フェイズに関する考察 ―素性継承の拡張― 大塚 知昇
L12. 放射係数