Slide
Show JP
☰
探索
サインイン
サインアップ
アップロード
×
ダウンロード
カテゴリーなし
WPR-3
WPR-2
PPT
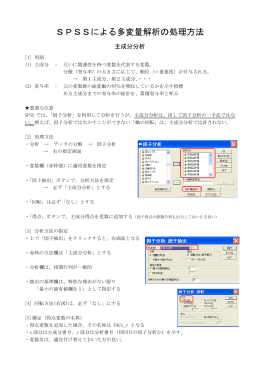
主成分分析
ppt - 大阪工業大学
画像認識のための統計学 -分類,最適化,モデル化-
生物統計学14のパワポ
リーダビリティ研究の知見を利用 したKYコーパスの定量的分析: 自動
主成分分析 クラスタリング
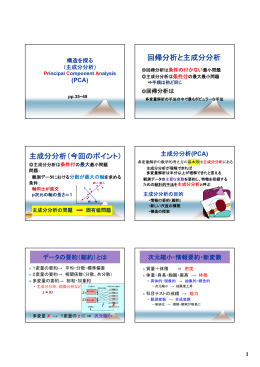
回帰分析と主成分分析 主成分分析
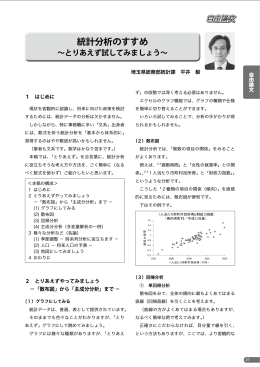
統計分析のすすめ~とりあえず試してみましょう
シラバス - 脳科学専攻間融合プログラム
主成分分析 -因子分析との比較-