Slide
Show JP
☰
探り
ログイン
ユーザーアカウントの作成
Upload
×
ダウンロード
No category
システム提案プレゼン
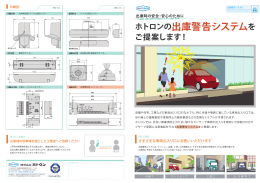
ホトロンの出庫警告システムを ご提案します!
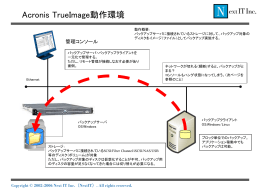
DAL BackupSystem