Slide
Show JP
☰
探索
サインイン
サインアップ
アップロード
×
ダウンロード
カテゴリーなし
制御系解析基礎 - 東京工業大学
Document
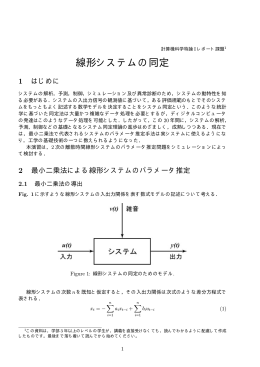
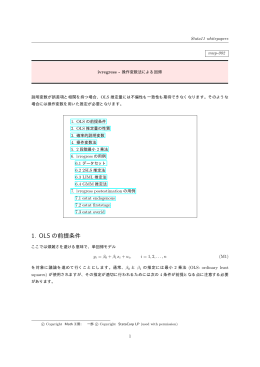
1. OLS の前提条件