Slide
Show JP
☰
探り
ログイン
ユーザーアカウントの作成
Upload
×
ダウンロード
No category
Virtual Reality and its Application
Virtual Reality and its Application
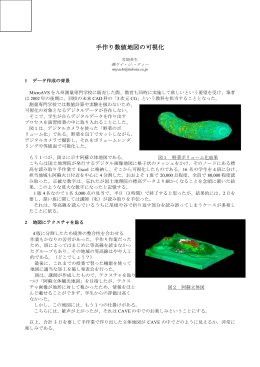
1 データ作成の背景
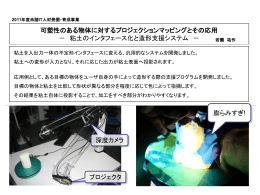
可塑性のある物体に対するプロジェクションマッピングとその応用 - 粘土
ゲームが脳へもたらす影響
生涯学習ダイジェスト 講師:大野暢亮,受講生 1 名 13:00
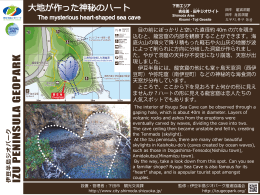
大地が作った神秘のハート
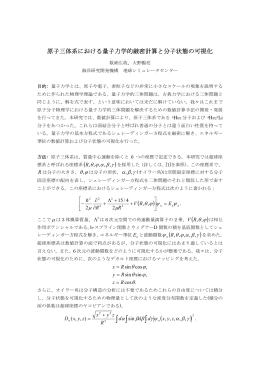
原子三体系における量子力学的厳密計算と分子状態の可視化
岐阜県郡上市、大滝鍾乳洞のユニークな鍾乳石の考察
万葉集と洞窟そのⅣ 悲劇の皇子が眠る“太陽の洞窟”・二上山(奈良県
声に出して読みたい CAVE 語 死 ぬがよい 最終 鬼畜 兵器 ・蜂
VRメールシステム - Electronic Visualization Laboratory