Slide
Show JP
☰
探り
ログイン
ユーザーアカウントの作成
Upload
×
ダウンロード
No category
ロボティクスーその来し方行く末
G071211
(直交座標)制御系
募集要項2015PQダウンロード
7 エレベーター
平成 23 年度の大型クラゲ出現状況
風評被害に負けるな!!
積 雪 の沈降力 (第 2 報) t6.
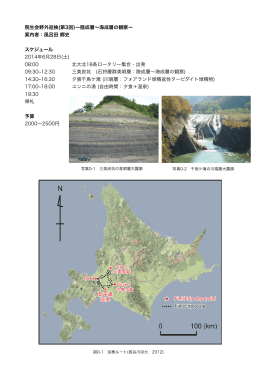
巡検案内書ダウンロード - 12/11 第三回 院生会自主ゼミ