Slide
Show JP
☰
探索
サインイン
サインアップ
アップロード
×
ダウンロード
カテゴリーなし
発表資料
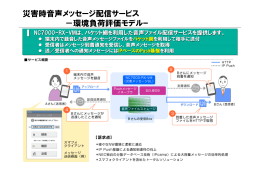
災害時音声メッセージ配信サービス -環境負荷評価モデルー
本文 - 情報工学科・専攻