Slide
Show JP
☰
探索
サインイン
サインアップ
アップロード
×
ダウンロード
カテゴリーなし
4足歩行ロボットを作ろう - TDUいんざいイノベーション推進センター
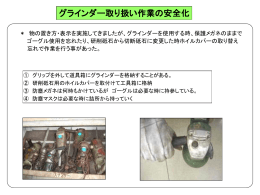
グラインダー取り扱い作業の安全化
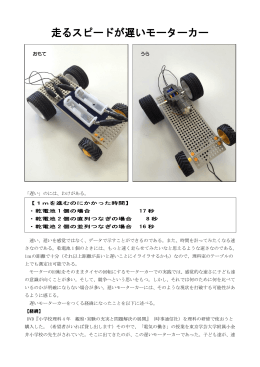
走るスピードが遅いモーターカー