Slide
Show JP
☰
探索
サインイン
サインアップ
アップロード
×
ダウンロード
カテゴリーなし
生物の特徴を生かした水中ロボットの 論理モデルと
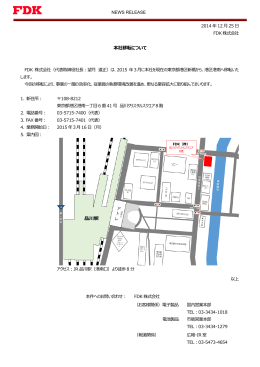
本社移転について
子会社の清算結了に伴なう特別利益の計上に関するお知らせ
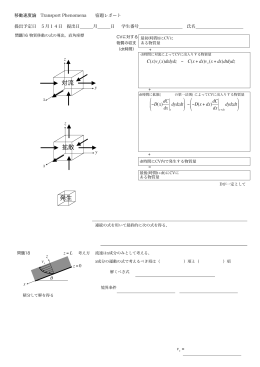
対流 拡散 発生
環境教育・啓発
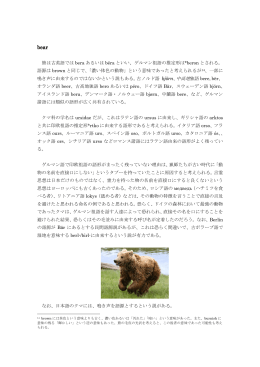
björn、中高地
オブジェク ト指向シミュレーターの研究
丁字屋西村の写本目録
問題5
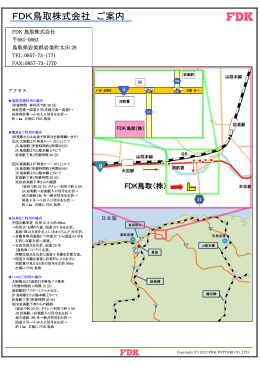
FDK鳥取株式会社 ご案内
Page 1 Page 2 研究会報告 植物揮発性物質が媒介する生物間相互
P52~66
Title 移植民奬勵問題と世の謬見 Author(s) 山本, 美越乃 Citation 經濟