Slide
Show JP
☰
探り
ログイン
ユーザーアカウントの作成
Upload
×
ダウンロード
No category
動きを見たい人はこちら!
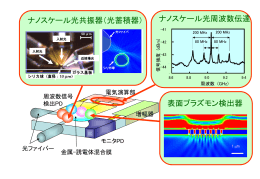
近接場光発生素子の微小開口の作製
リー群 SO(3)とリー環 so(3)の可視化と外積の関係 2013.6.30. 前田
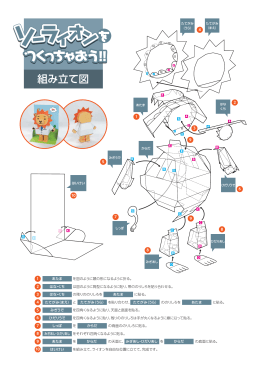
組み立て図
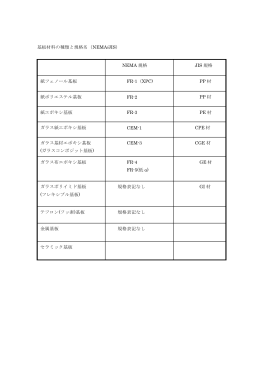
基板材料の種類と規格名