Slide
Show JP
☰
探り
ログイン
ユーザーアカウントの作成
Upload
×
ダウンロード
No category
Matlab測位プログラミングの 基礎とGT
RTK-GPS用プログラムライブラリRTKLIBの開発・評価および応用
ἇὅỿἷὊằẾẮẪ
時間・空間補間した基準局網観測値によるキネマティックGPS性能の評価
Document
その - 測位衛星による高精度測位技術の研究開発
Presentation
その - 測位衛星による高精度測位技術の研究開発
搬送波位相測定値による 精密測位の理論及び解析処理 Precise
PowerPoint プレゼンテーション
PowerPoint プレゼンテーション
Document
PowerPoint プレゼンテーション
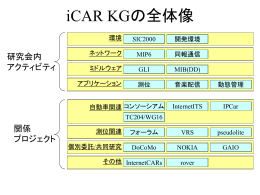
iCAR KGの全体像
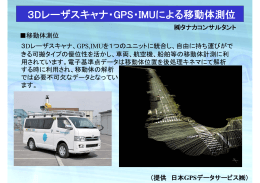
3Dレーザスキャナ・GPS・IMUによる移動体測位
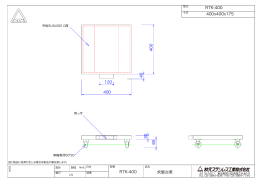
炊飯台車 400x400x175 RTK-400 RTK-400
地域農林業の飛躍をめざして