Slide
Show JP
☰
探索
サインイン
サインアップ
アップロード
×
ダウンロード
カテゴリーなし
ダウンロード(PDF)
高エネルギー加速器研究機構 大型シミュレーション研究 07
分子動力学モデルによるパーライト鋼のナノ伸線加工
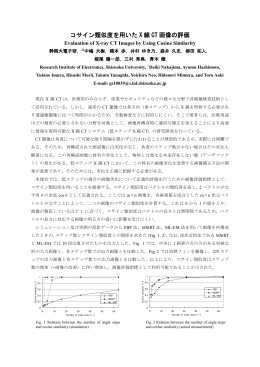
コサイン類似度を用いた X 線 CT 画像の評価
新型Multi Angle VisionTMシステム
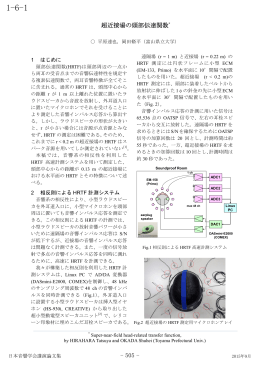
超近接場の頭部伝達関数* - 平原研究室
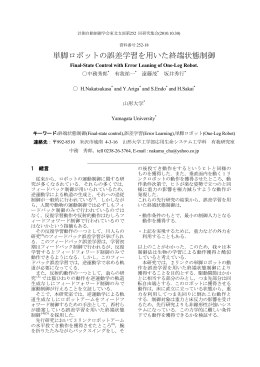
単脚ロボットの誤差学習を用いた終端状態制御
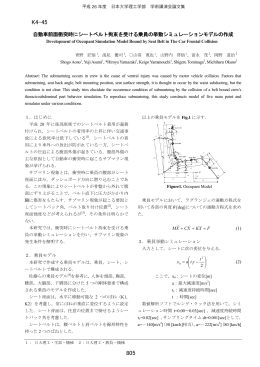
サブマリン現象 - 日本大学理工学部
Page 1 Page 2 E y かり二 かり。 = “ォ=離コ 電源電圧を基準と した角度
小児外固定具装着状態における 肘関節撮影補助具
ドライバーの視界補助を行なう Multi Angle Vision™ システム
高速ビジョンシステムを用いた 2リンクフレキシブルアームの制御
新しいドリル形状を創成するシステムの開発 - イレブン Monthly Chubu