Slide
Show JP
☰
探索
サインイン
サインアップ
アップロード
×
ダウンロード
カテゴリーなし
ノンホロノミックロボットに関する研究 1. 緒 言 2. ロボット
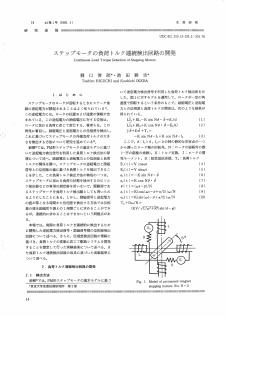
ステッ プモータの負荷 トルク連続検出回路の開発
(九工大),荒木嘉昭,西田英一(バブ日立),天羽映夫
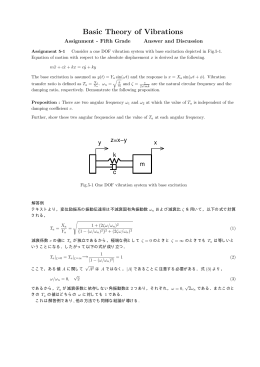
Basic Theory of Vibrations
表面筋電位を用いた運動時の人体関節トルクの推定 Estimation of
110 - 日本機械学会
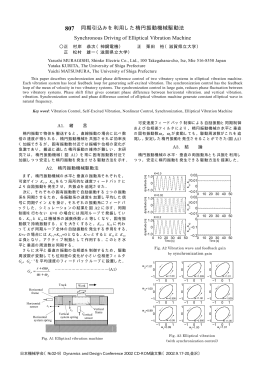
w408 - 日本機械学会
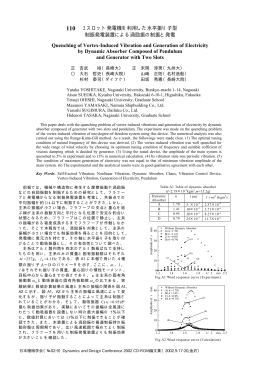
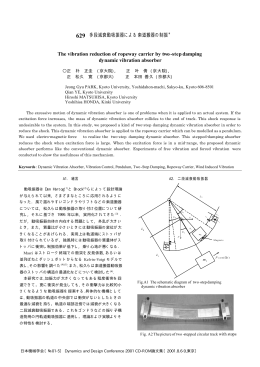
振動モードの切替えによる斜張橋斜材ケーブルの制振
都市防災工学 内 容 1質点系モデル 基礎(復習)
こちら
629
807 - 日本機械学会