Slide
Show JP
☰
探索
サインイン
サインアップ
アップロード
×
ダウンロード
カテゴリーなし
LMー を使ったアクティブーサスペンションのロバスト制御
3.2.C. 推論
人手やミツバチによらない人工授粉が必要
分かりやすいパターン認識
ま え が き
講義07 システムの応答∼状態方程式の解∼
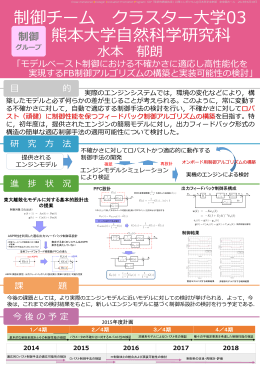
実際のエンジンシステムでは,環境の変化などにより,構 築したモデルと
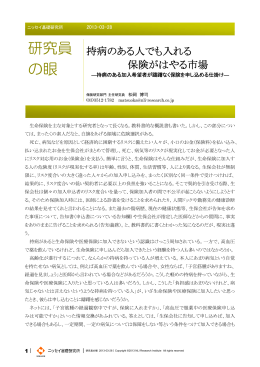
持病のある人でも入れる保険がはやる市場 ―持病のある加入希望者が
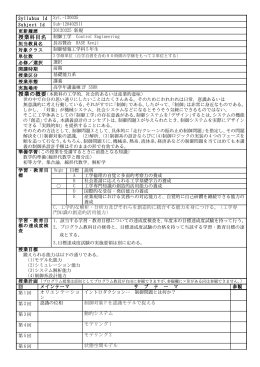
制御工学
別ウィンドウで全文表示
2014年度制御工学I 第1回資料 1
§1.計測の意義 §2.測定法 §3.誤差の種類と対策 §4.誤差 §5.誤差の伝搬
Document