Slide
Show JP
☰
探索
サインイン
サインアップ
アップロード
×
ダウンロード
カテゴリーなし
ステッピングモータの基本
弛緩状態の人間の肘まわりの力学特性解析 - MIUSE
5 化学平衡
ステップ角度 15 °で小型ステッピングモータ ステッピングモータ
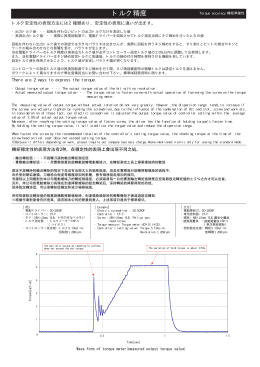
トルク精度
誘導機駆動鉄道車両の超過角運動量補償 に基づく再粘着制御 原崇文
110617