Slide
Show JP
☰
探索
サインイン
サインアップ
アップロード
×
ダウンロード
カテゴリーなし
爪先装着型センサによる平地歩行時爪先挙動の推定
基礎編サンプル
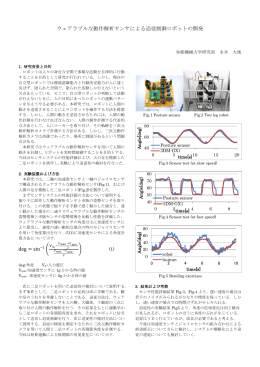
ウェアラブルな動作解析センサによる追従制御ロボットの開発 deg = sin−1
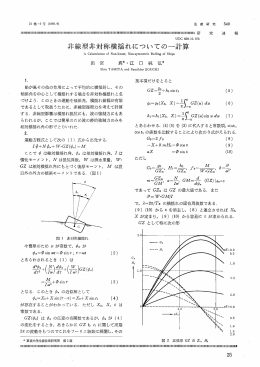
非線型非対称横揺れについての一計算