Slide
Show JP
☰
探索
サインイン
サインアップ
アップロード
×
ダウンロード
カテゴリーなし
四足ロボットの生物規範型不整地適応動歩行
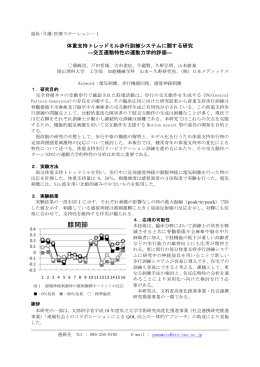
体重支持トレッドミル歩行訓練システムに関する研究
病期別にみた脳卒中片麻痺者の歩行改善に向けて ―急性期・回復期
安定周期軌道をもつ非線形力学系の構成法とその歩行パターン生成への
運動神経系に基づく蛇型ロボットの蛇行運動制御方 法に関する研究
第1回CPG workshop のご案内
周波数と位相の調整が可能な マルチリズミックオシレータモデル