Slide
Show JP
☰
探索
サインイン
サインアップ
アップロード
×
ダウンロード
カテゴリーなし
ばね–リンク機構を用いた 外殻型2自由度屈曲マニピュレータの開発
基礎編サンプル
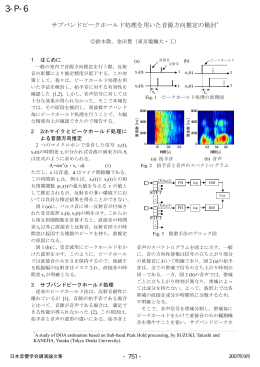
発表文献 - 東京電機大学 音響信号処理研究室